入门精要|02 图形学基础02
输入装配阶段
三维模型本质是成千上万的顶点数据,比如一个正方形就有8个顶点,输入装配阶段则是对于模型顶点的第一次处理,将顶点装配成图元
该阶段不可编程
顶点着色阶段
顶点着色器会遍历传入的每一个顶点进行着色,注意,虽然叫着色器,但并不是字面意义上“计算颜色”,顶点着色阶段还有很多额外的操作,比如最重要的操作就是空间转换
模型空间
所谓模型空间,就是3D建模软件中的空间
世界空间
世界空间,是模型导入U3D之后的空间,模型在模型空间和世界空间中会一样吗?那显然未必,因为我们可以在U3D中对导入的模型进行缩放旋转位移等操作
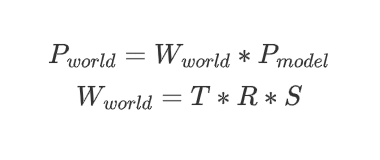
我们称缩放矩阵为S,旋转矩阵为R,平移矩阵为T,注意顺序只能是:缩放->旋转->平移
即如果有一个模型空间中的点A,想要转换到世界空间B,则B=(TRS)*A
观察空间
所谓观察空间,是从摄像机是角度出发看到的空间,Scene视图是世界空间,Game视图就是摄像机空间
根据上一篇内容可以知道,我们只要能够得到观察空间的3个基底向量在世界空间中的表示,就可以得到对应的变换矩阵了
首先我们定义一下我们的观察空间
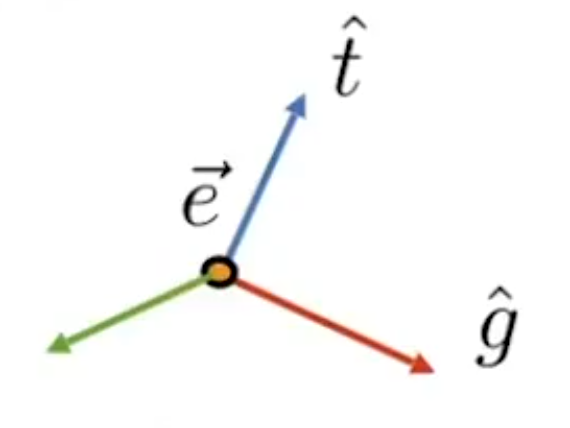
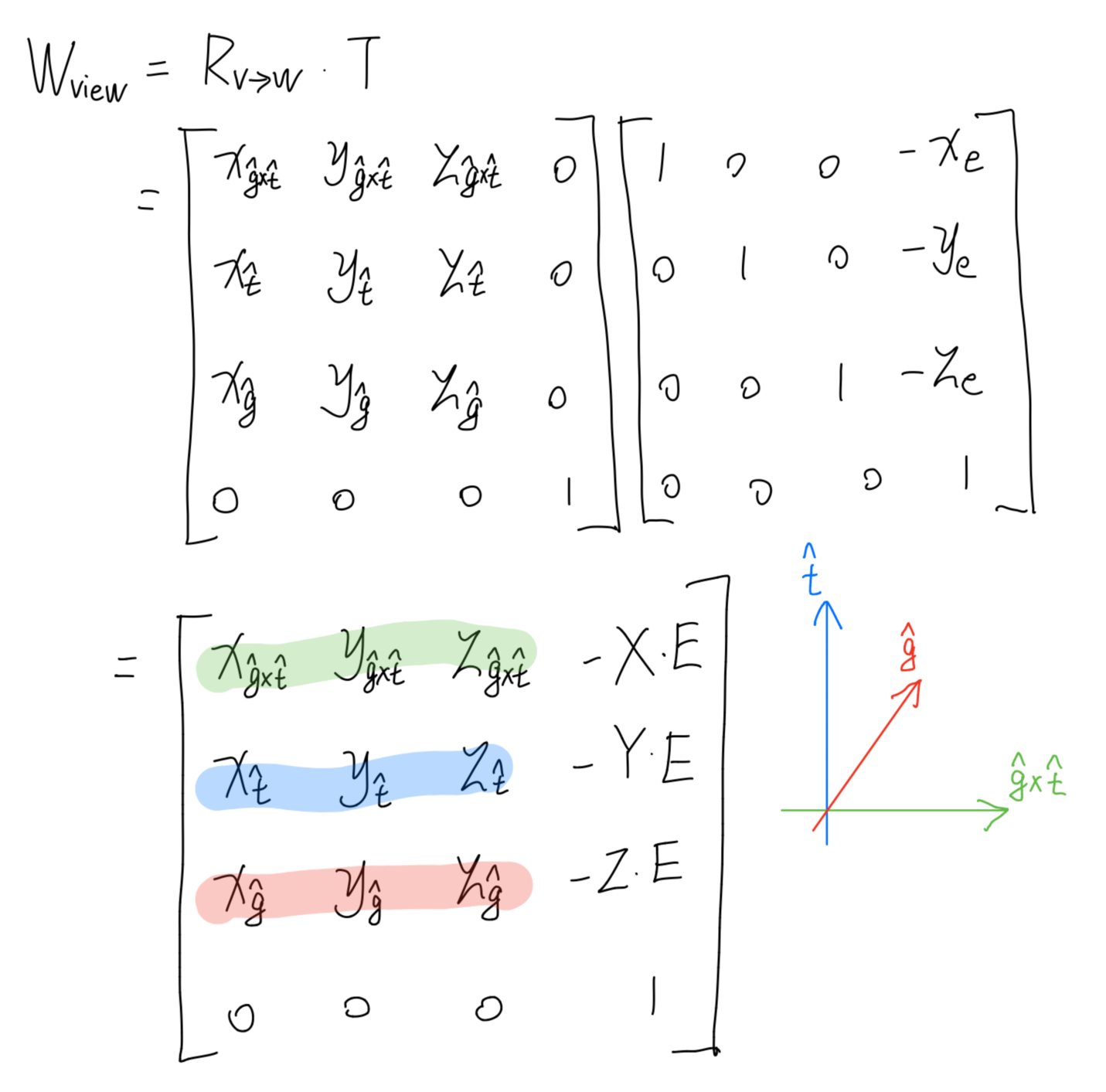
定义摄像机原地为e,上方向为t,看着的方向为g,那么自然可以得到右方向为gxt
我们是想要从世界空间变换到观察空间
但很有意思的是, 摄像机他本身也是在世界空间中啊
所以我们可以假设有一个理想状态,相机原点就是世界原点,t轴指向Y,g轴指向Z,那么gxt自然就指向X
此时观察空间就等于世界空间!
那么问题就变成了,如何将现在的摄像机转化成一个理想状态下的摄像机?
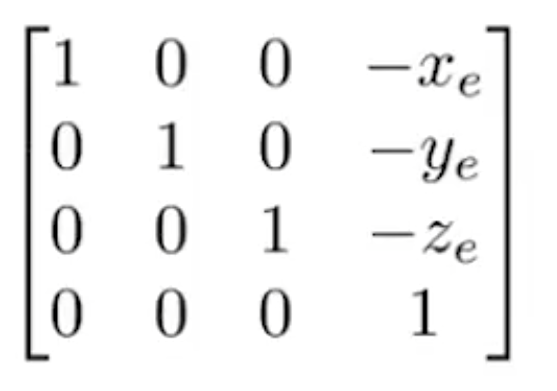
首先平移矩阵是很好写的,因为知道摄像机的原点坐标e,那么想把摄像机平移到原点,矩阵自然为:
而且这里也不存在缩放矩阵,那么自然是只剩下一个旋转矩阵了,即,通过某一个旋转矩阵,把摄像机的3个轴旋转至和世界坐标轴重合
这是比较困难的
但是,世界坐标轴我们是知道的,即(1,0,0)(0,1,0)(0,0,1),反过来想,将这3个的轴旋转到摄像机轴,应该很简单吧?
确实如此,我们能直接给出旋转矩阵:
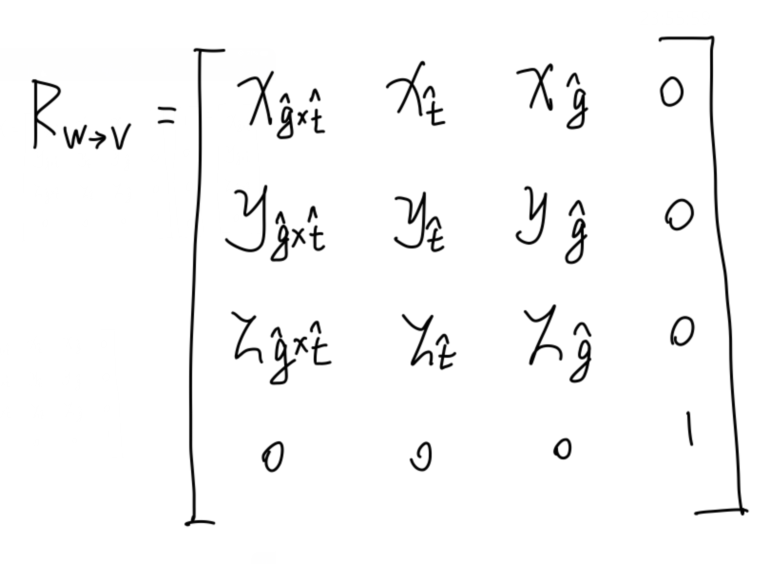
不难验证
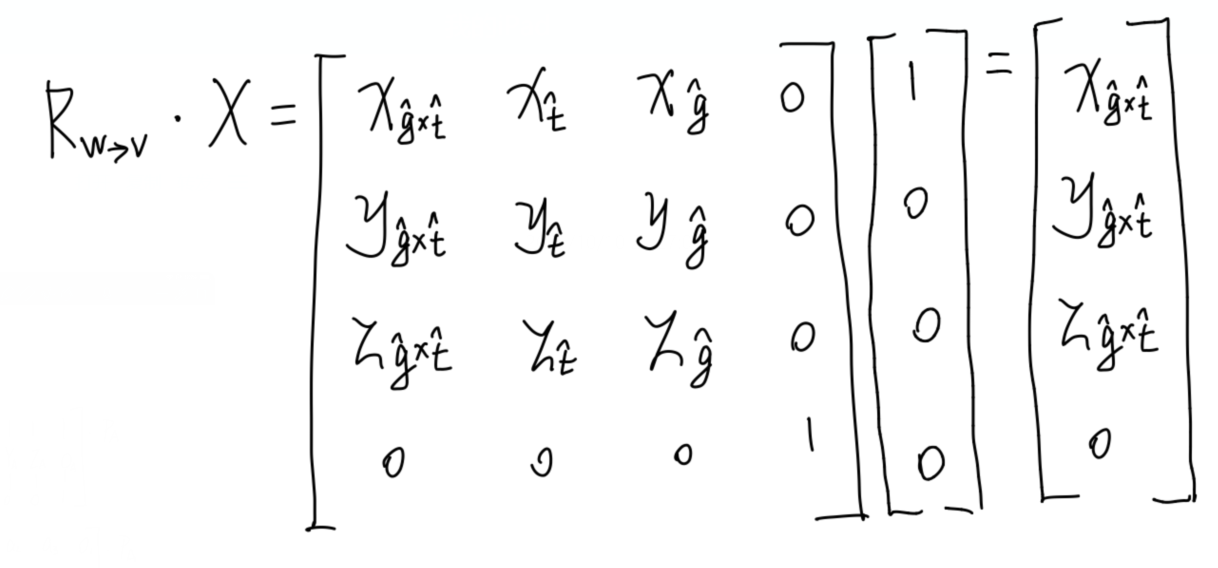
说明这个矩阵确实能把世界空间的3个轴旋转至观察空间
那么反过来,观察空间至世界空间的旋转矩阵就是这个矩阵的逆矩阵了,而且旋转矩阵是一个正交矩阵,所以有:
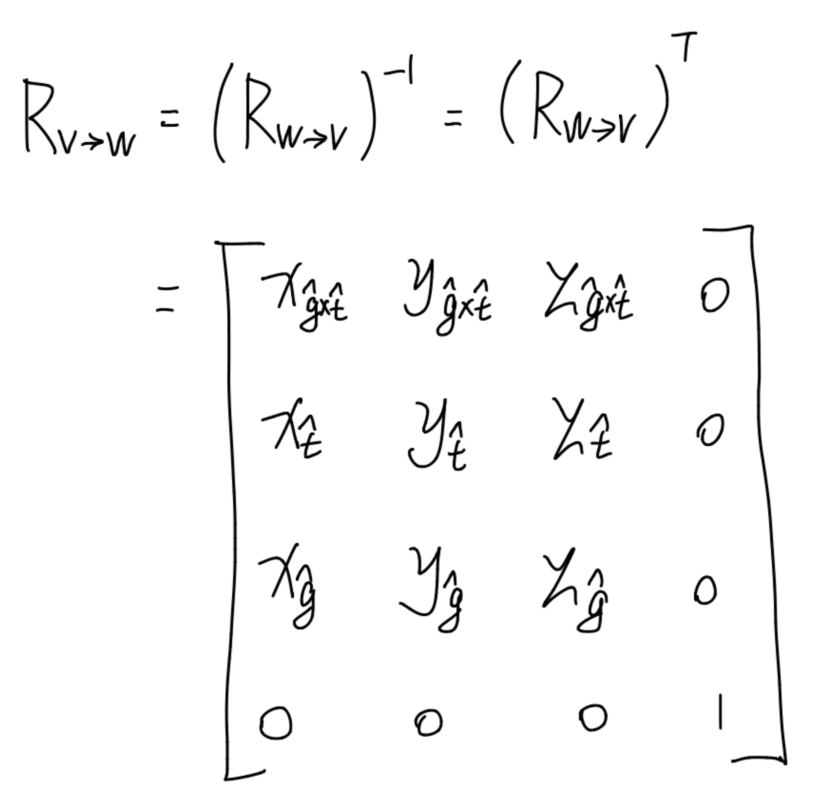
总结一下就是
裁剪空间
投影
所谓投影,其实是有2个操作
一是确定我们摄像机的可见空间,毕竟肯定不可能加载所有观察空间中的物体!
二是把可见空间(三维)中的物体投影到一个投影窗口(二维),投影窗口即类似于屏幕了(但不是屏幕空间)
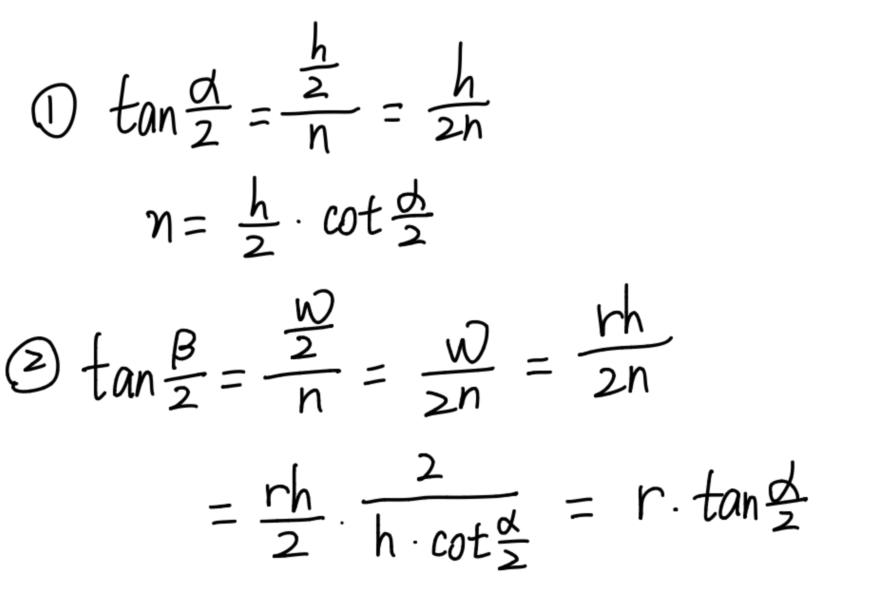
首先我们定义可见视锥
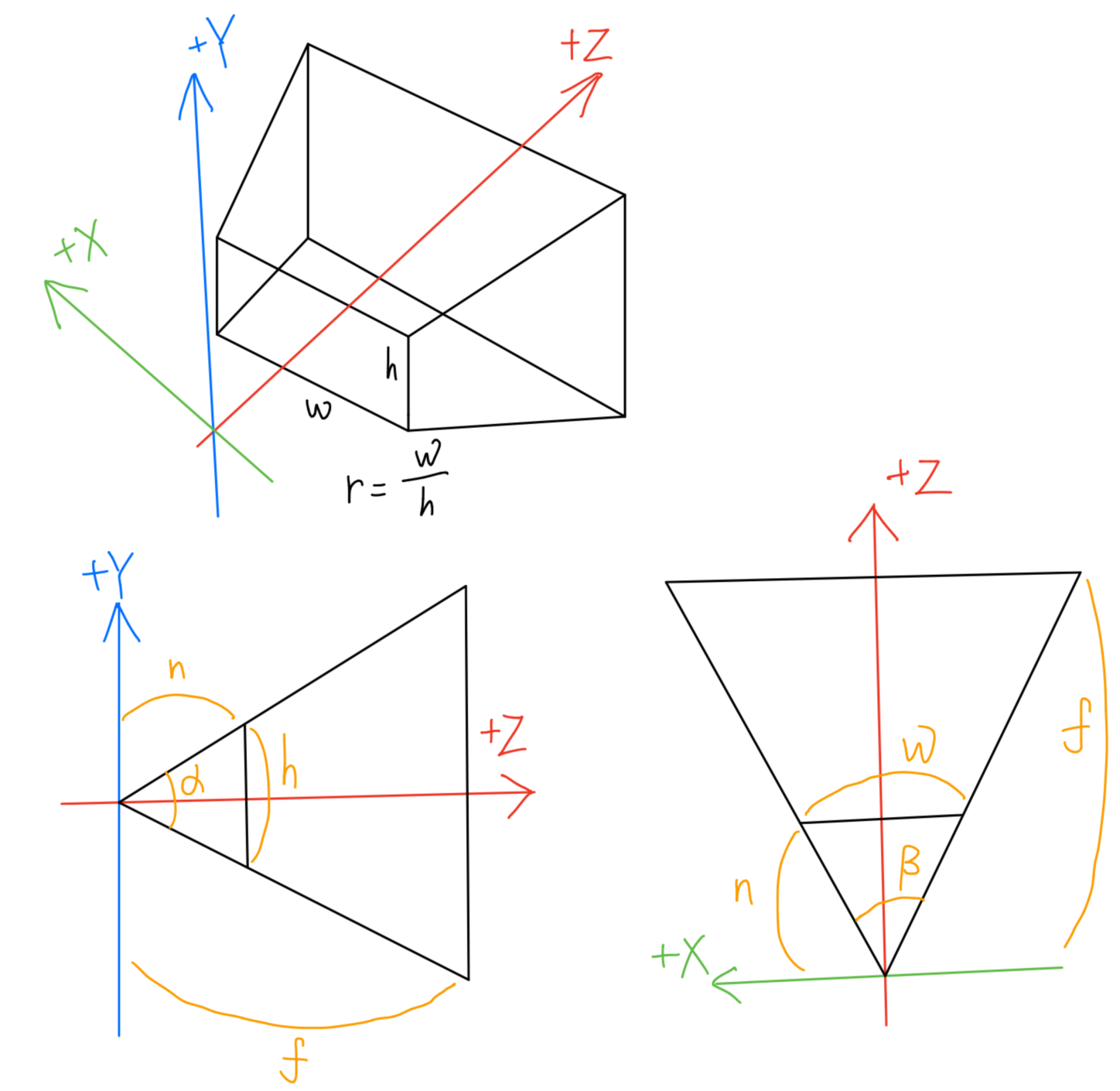
首先轻松可以得到两个公式
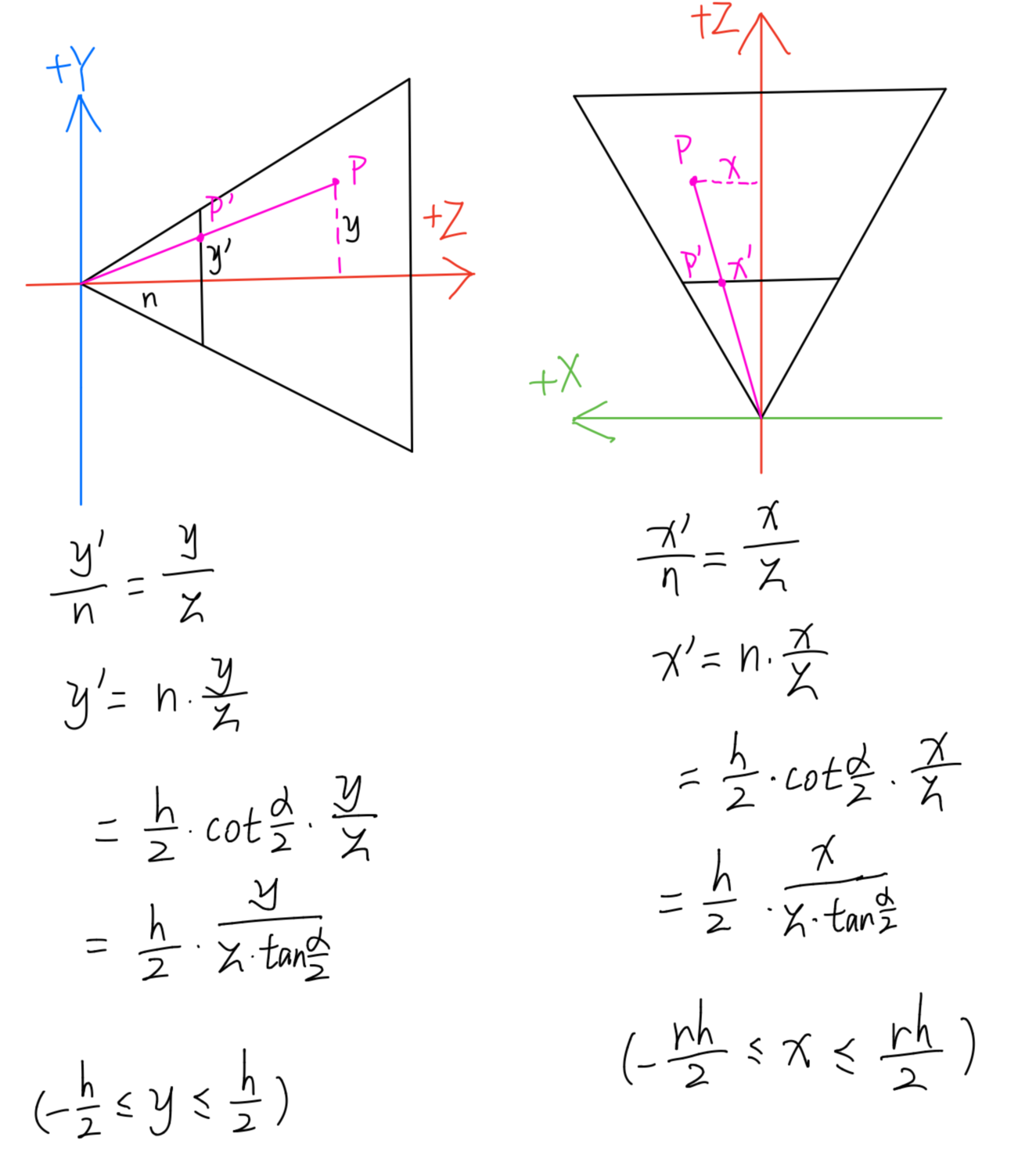
目标是把视锥内的每一个点投影至近平面,利用相似三角形不难计算
NDC空间
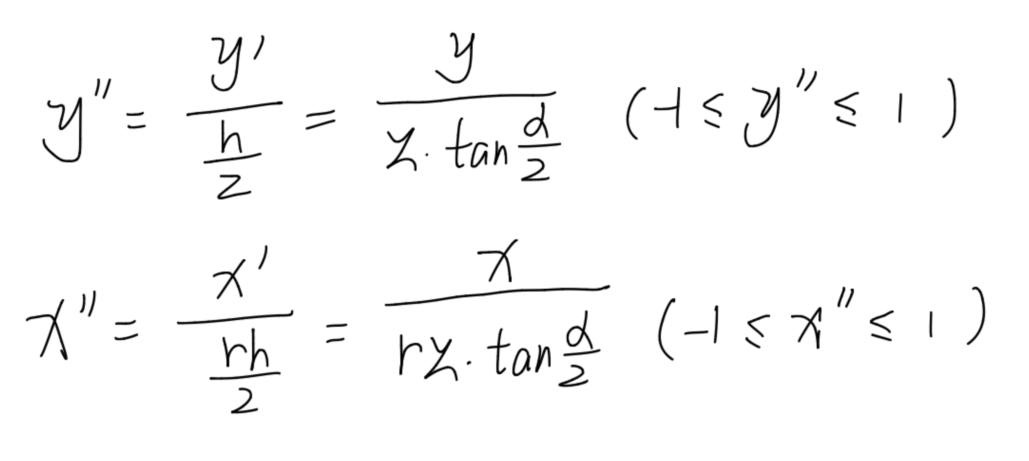
经过上述计算后,x y的坐标仍然和h还有r有关系,而我们希望规格化坐标,使得x y均处于-1到1之间,则有
矩阵
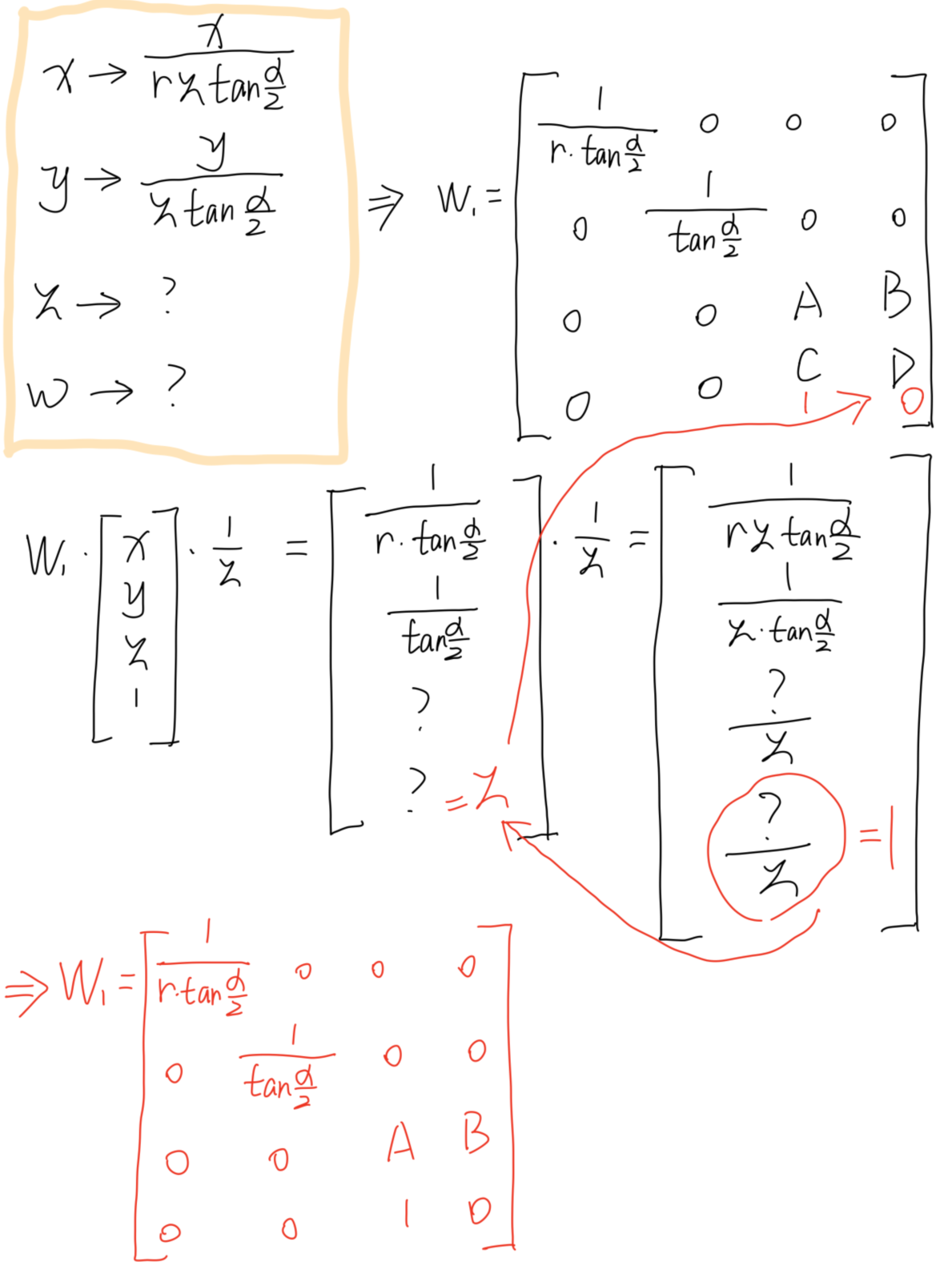
不难发现,y h r为定值,但z会随着x而变动,所以这不是一个线性变换,我们不能用一个矩阵直接来描述上述过程,那我们先用一个矩阵计算上述变换的线性部分,再对结果进行除Z,可以有以下推论
最后
对于OpenGL,我们规定近裁面上的点最后会被投影到Z=-1,远裁面的点最后会被投影到Z=1
对于DIRECTX,我们规定近裁面上的点最后会被投影到Z=0,远裁面的点最后会被投影到Z=1
我们采用OpenGL的算法,假设现在有一个点X(x,y,z,1)
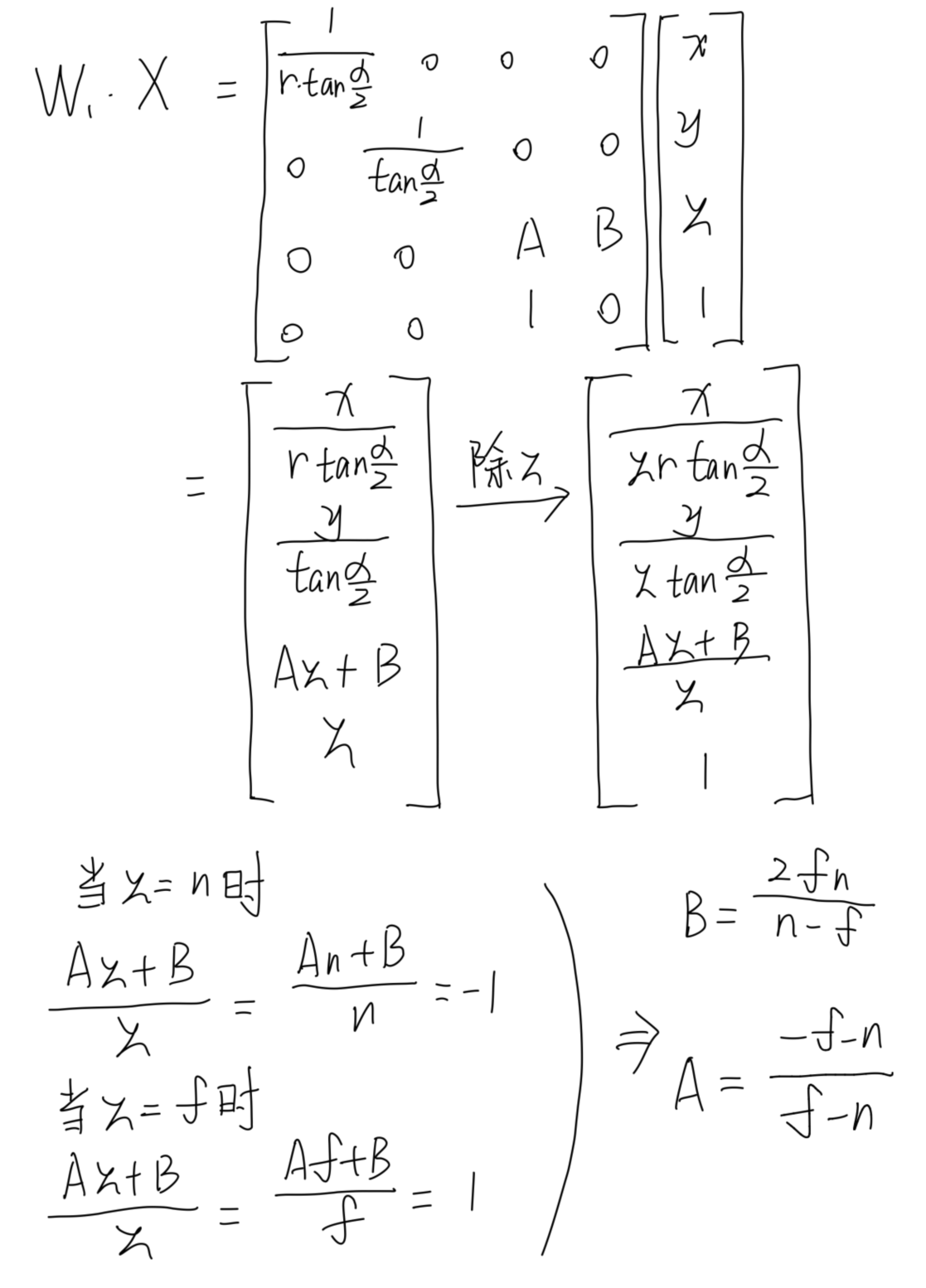
W1为透视投影矩阵,在经过透视投影后,坐标处于齐次裁剪空间,此时需要进行一次除Z(透视除法),进入NDC空间
曲面细分阶段
略
几何着色阶段
会进行一次裁剪, 位于视锥外的顶点会被剔除,此操作发生在齐次裁剪空间,透视除法之前
光栅化阶段
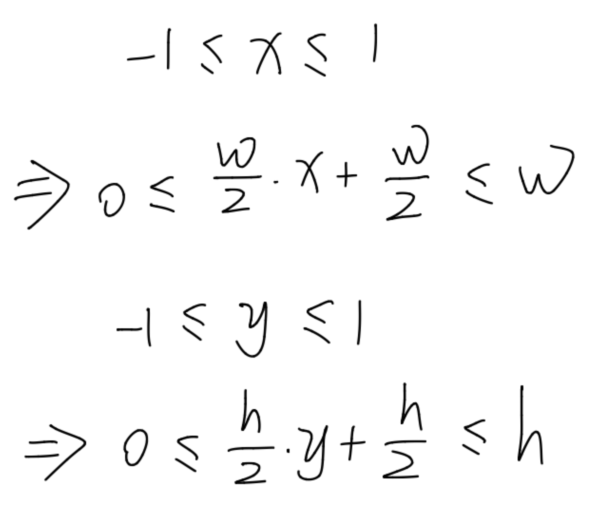
视口变换
将NDC空间的坐标映射到屏幕,NDC空间中的X Y范围是-1至1,Unity屏幕左下角为原点,右上角为(w,h),很容易得到转换公式
背面剔除
略
顶点属性差值
三角形重心坐标公式
像素着色阶段
略
输出合并阶段
略